N-FMS
작업 관리자
- 작업 상태 관리
- 작업 세분화 관리
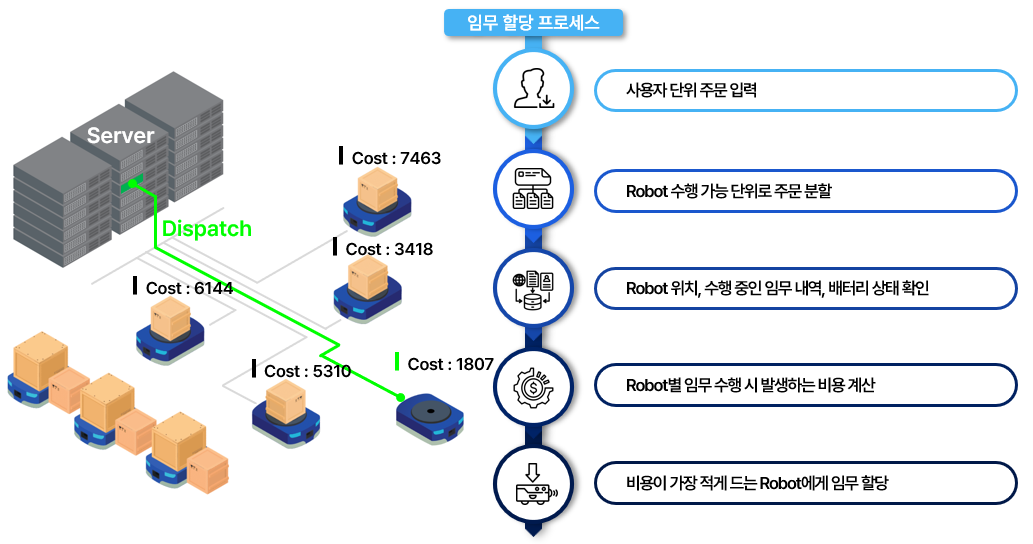
작업 배정
- 효율적인 mission 수행을 위한 밴도 선정 결정
- 작업 수행에 적합한 로봇 선정
교통 제어
- 작업을 수행하기 위한 경로 생성
- 교통 흐름을 고려하여 교차를 최소화 하는 경로 생성
로봇 관리자

- 연동된 모든 Robot의 위치 및 상태 관리
- 연동된 Robot에게 계산된 경로 전달
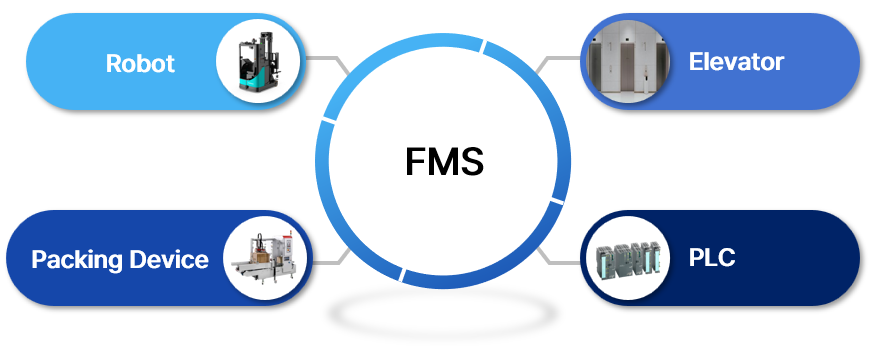
기존 FMS의 한계 → 다양한 창고 환경에서 적용 가능한 유연한 사용자 맞춤형 시스템
N-FMS 시스템은 다양한 창고 환경에 적용할 수 있는 적응력과 다용도로 설계되었습니다. 종종 특정 창고 유형과 프로세스에 국한되는 기존 FMS의 한계를 극복합니다. N-FMS는 사용자 맞춤형 솔루션을 제공함으로써 효율적인 임무 관리, 출동, 교통 통제 및 로봇 관리를 보장합니다.
유연한 작업 관리 시스템
S정교한 자원 관리 시스템
원활한 타사 장치 지원
스마트 교통 제어
- 실시간 최적화
- 충돌 예측 및 회피
- 비용 효율적인 경로 계산
- 실시간 최적화
- 충돌 예측 및 회피
- 비용 효율적인 경로 계산
사용자 친화적인 애플리케이션
통합 로봇 지원 시스템
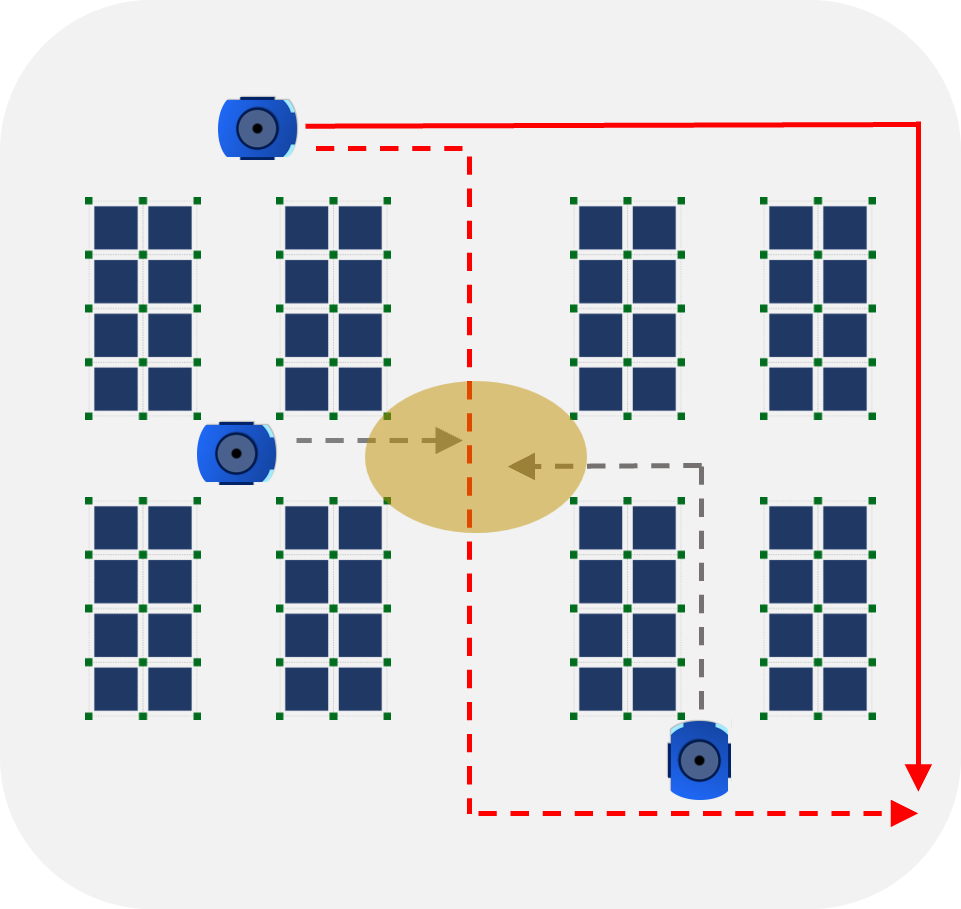
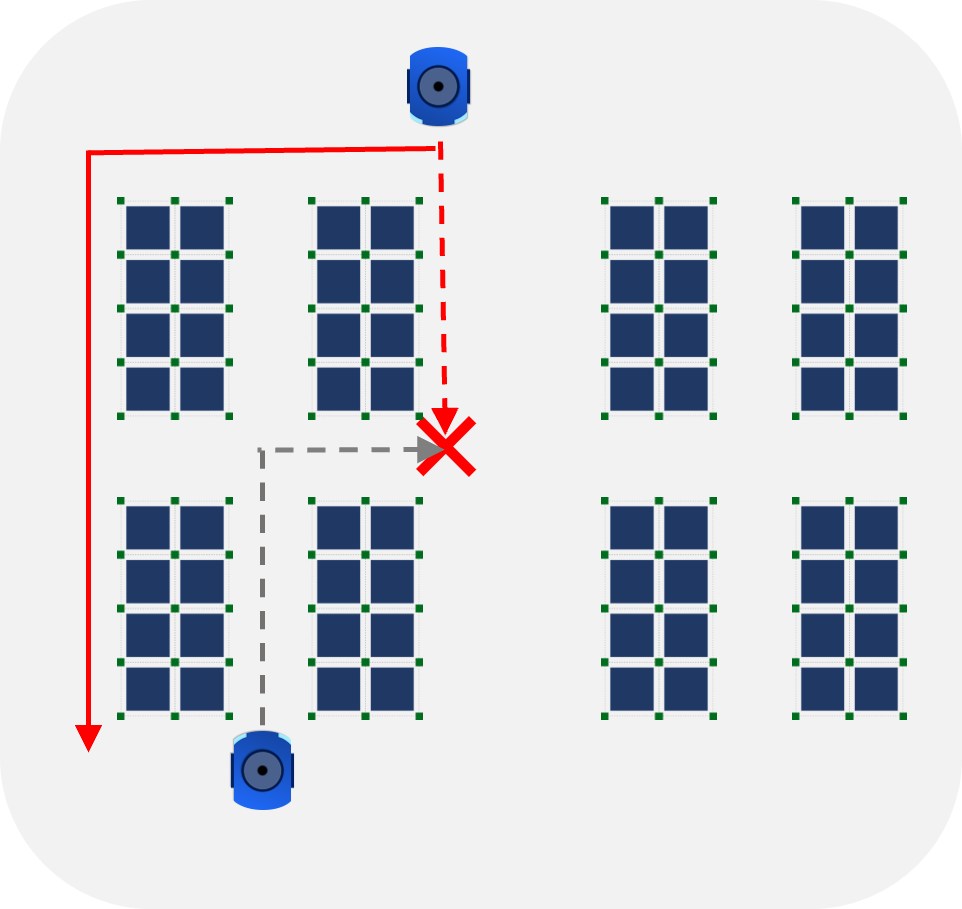
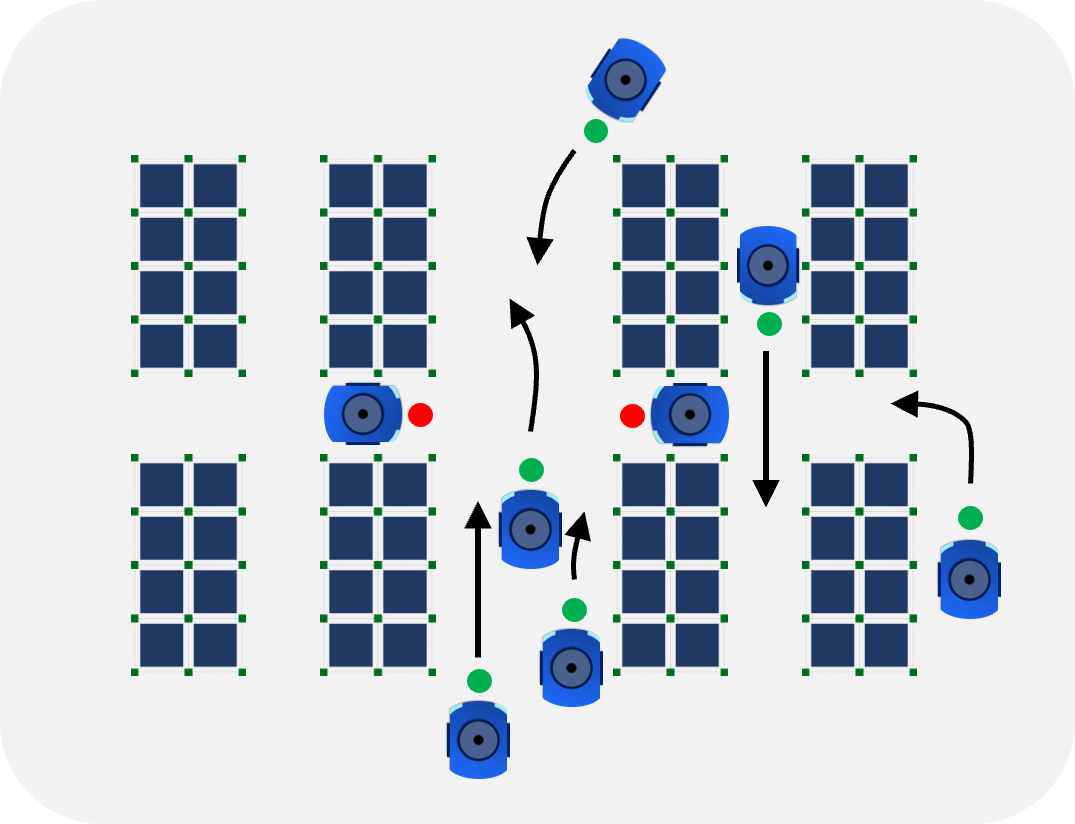
기능 1: Multy-Agent Path Finding (MAPF) (다중 에이전트 경로 탐색)
Robot 군집의 교통 상황을 고려하여 최적 경로를 생성하는 기능

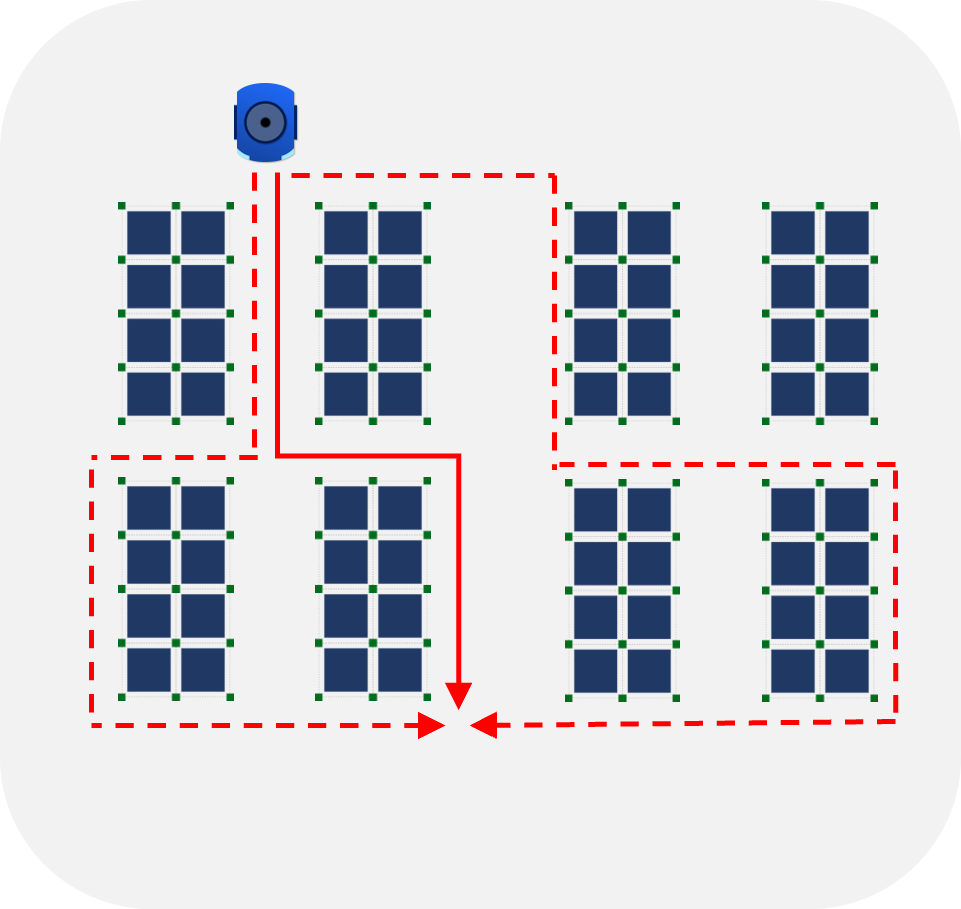
비용 효율적 경로 계산
- 소요 시간이 가장 짧은 경로 계산
- 이동 거리가 가장 짧은 경로 계산
- 에너지 절감
비용 효율적 경로 계산
- 소요 시간이 가장 짧은 경로 계산
- 이동 거리가 가장 짧은 경로 계산
- 에너지 절감
비용 효율적 경로 계산
- 소요 시간이 가장 짧은 경로 계산
- 이동 거리가 가장 짧은 경로 계산
- 에너지 절감
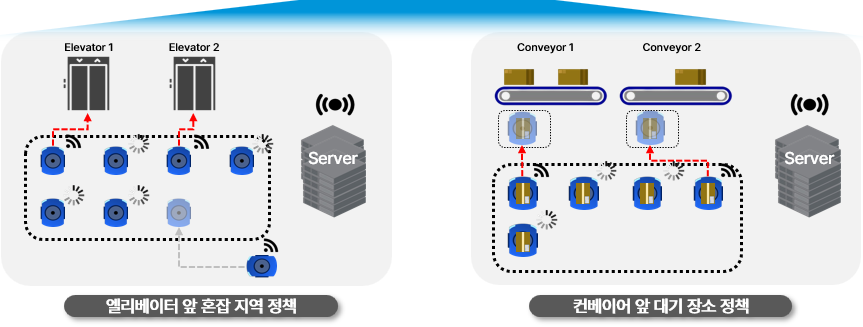
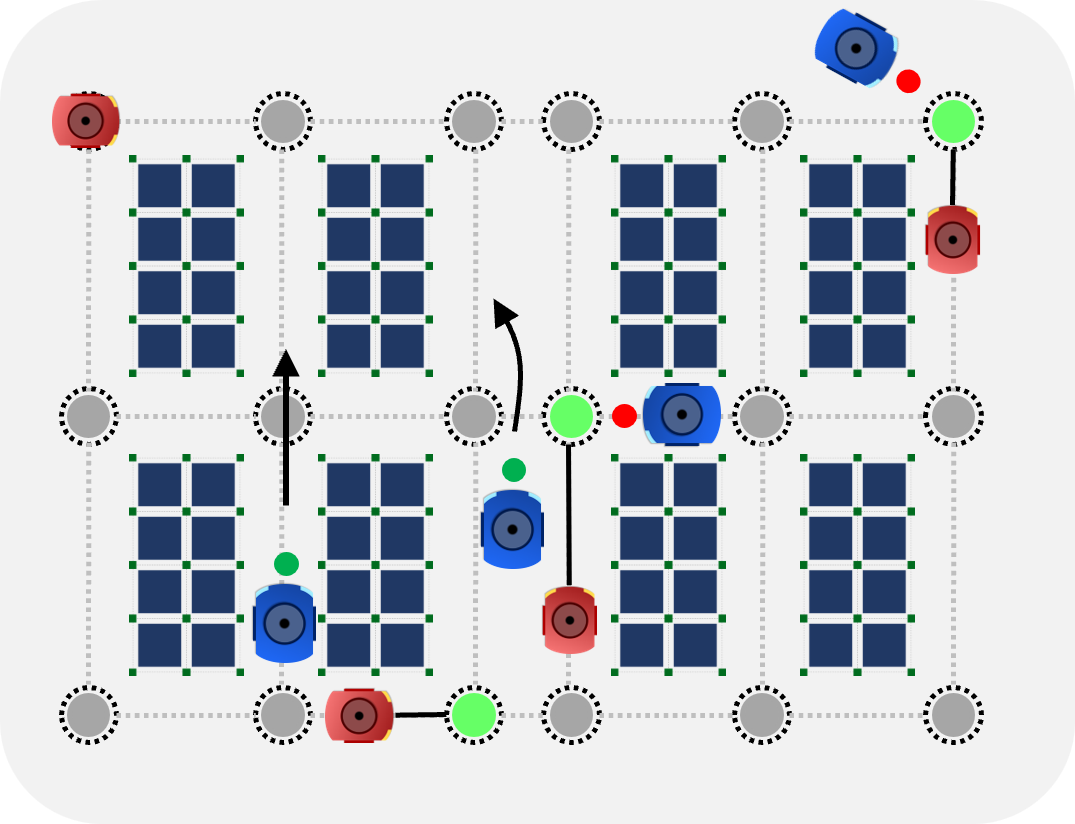
기능 2. Local-Area Policy (지역 정책)
혼잡 예상 지역에 대해 창고 환경에 적합한 맞춤형 정책을 적용하는 기능
기능 적용 프로세스
대기시간이 길거나, 수요가 많은 지역 선정
(Elevator, Conveyor, Charging Zone)
지역별 특징 추출 및
운용 정책 수립
지역별 지역 특화
정책 운용
작업 배정
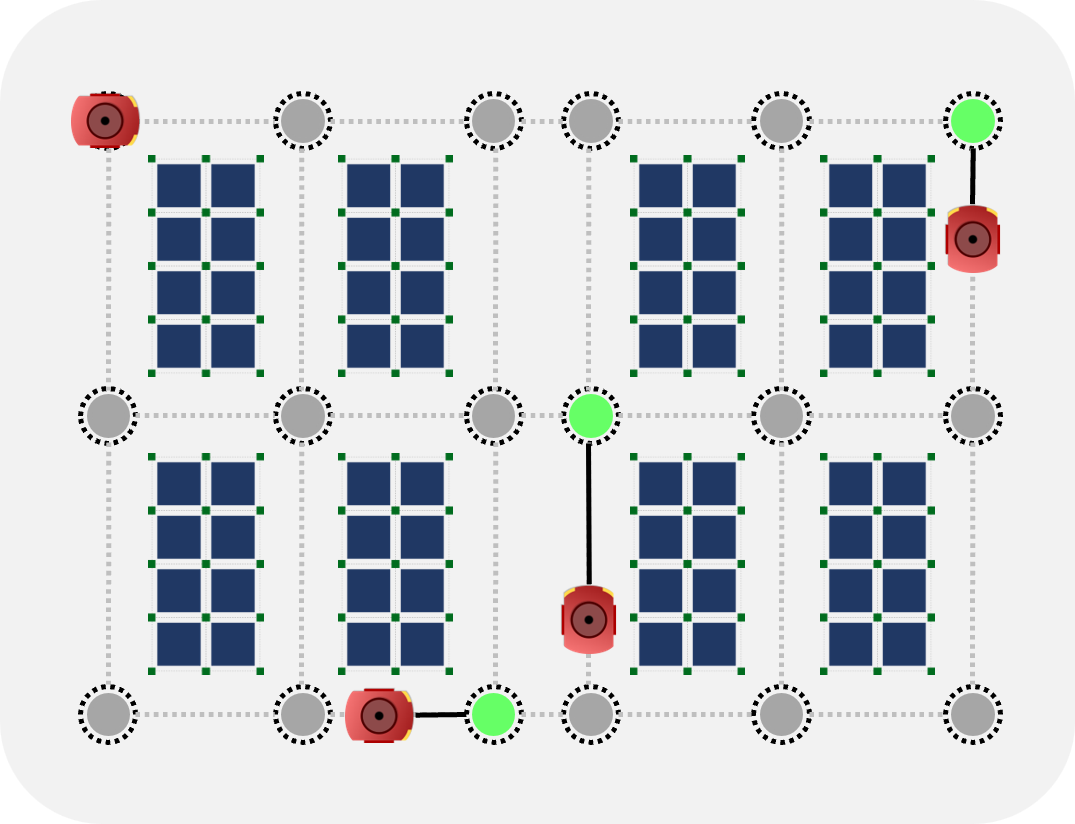
AGV
- Node / Edge를 공유
- AGV가 도착/도착 예정인 노드 활성화
- 활성화된 Node로 접근 통제 가능
AMR
- 정해진 도로내에서 자유롭게 횡단
- 교통 상황에 따라 일정 구역 통제 및 교통 흐름 제어
AGV/AMR
- 시계열 계산을 통한 충돌 상황 예측
- AGV : Node 활성화 상태 / 교통 상황에 따라 주행
- AMR : 교통 상황에 따라 주행
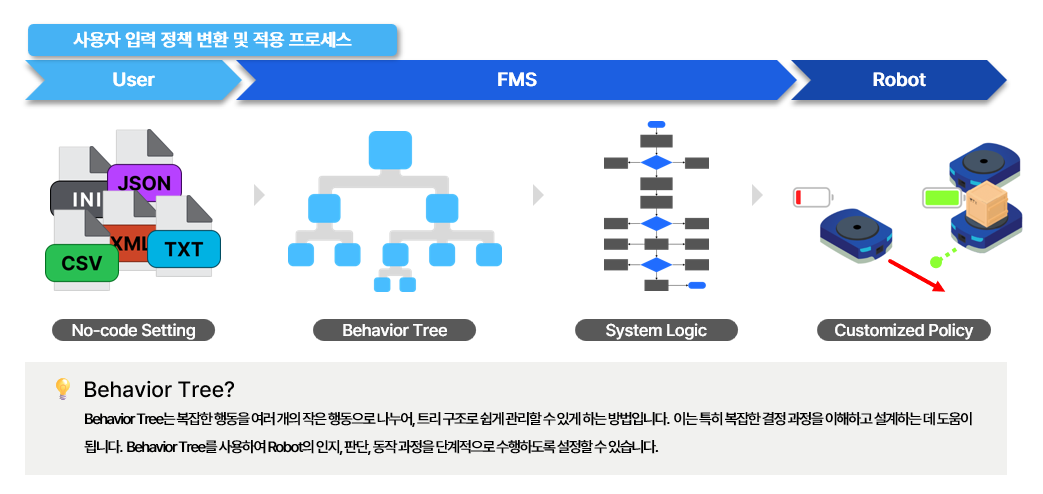
유연한 행동 맞춤화
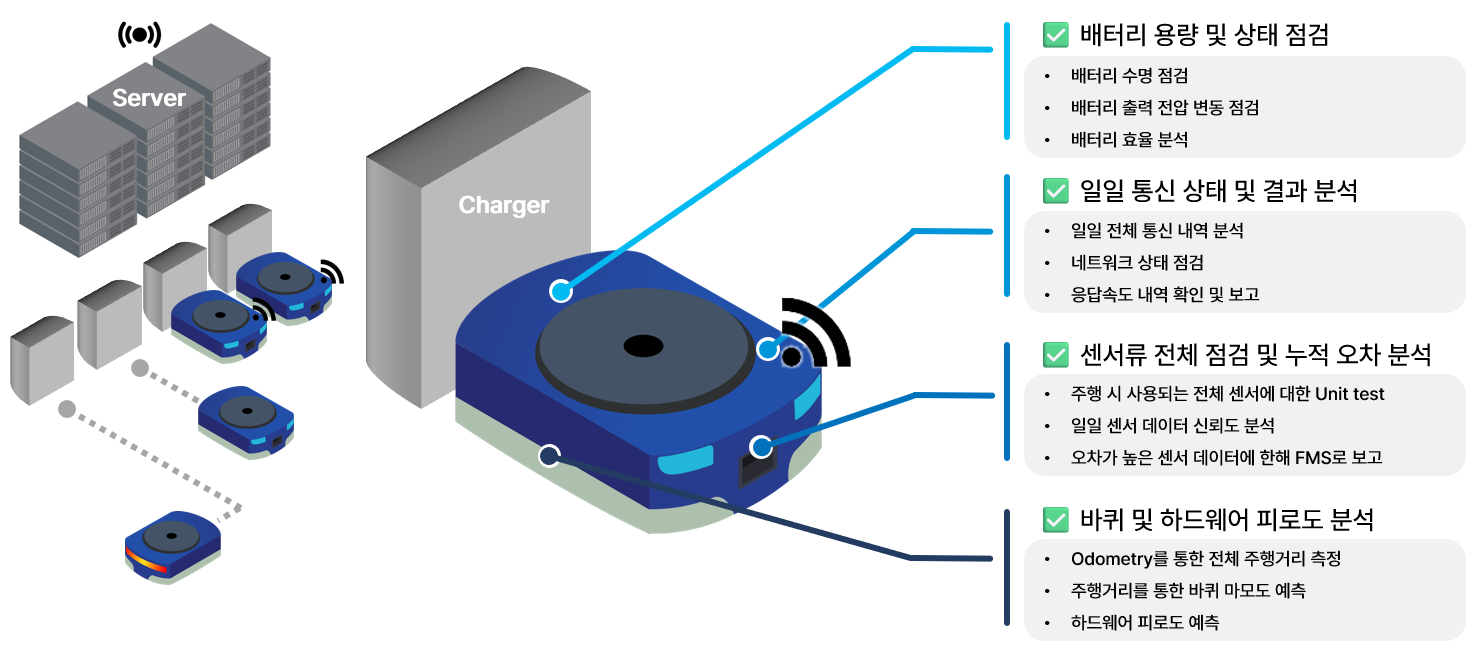
정교한 자원 관리
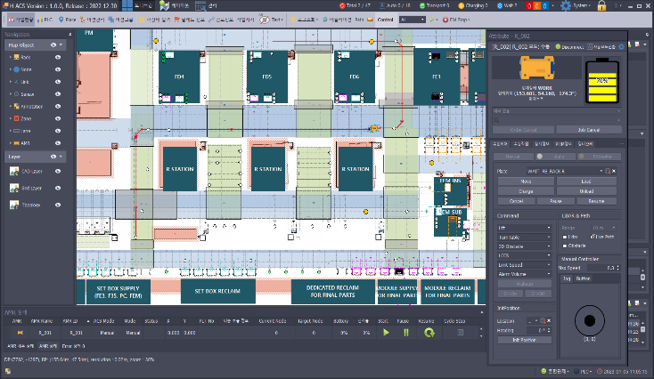
사용자 친화적인 애플리케이션
Robot 작업 및 주행 관련 설정
-
 로봇의 예상 주행 경로 확인
로봇의 예상 주행 경로 확인
-
화면을 통한 로봇의 경유지 및 목적지 지정
실시간 모니터링
-
로봇의 실시간 움직임 파악
-
원격 제어 가능
원활한 타사 장치 지원